Willkommen!
Ich bin Fabian Forster. Als Embedded Systems Engineer schlage ich die Brücke zwischen physischer Hardware und intelligenter Software. Mich fasziniert es, komplexe Systeme nicht nur in der Theorie zu entwerfen, sondern sie von Grund auf zu bauen und zum Leben zu erwecken.
Ob es darum geht, Sensordaten über CAN-Bus und UART auszulesen, die Kinematik für einen selbstgebauten Roboterhund zu berechnen oder KI-gestützte Systeme in C++ und Python zu simulieren – ich arbeite am liebsten dort, wo Mechanik, Elektronik und Code verschmelzen.
(Klicke auf die untenstehenden Überschriften, um meine Projekte und meinen Werdegang zu entdecken.)

Meine Werkzeuge & Technologien
- 💻 Software & KI: C, C++, C#, Python, TensorFlow, OpenCV, Crew AI, MATLAB, Simulink
- 🔌 Embedded & Hardware: Mikrocontroller-Programmierung, CAN-Bus, UART, VHDL, Vitis HLS, Vivado, Raspberry Pi, Arduino
- ⚙️ CAD, 3D & Design: Autodesk Fusion, Blender, Unity, 3D-Druck
- 🌐 Web & Sonstiges: Flutter, Firebase, HTML, CSS, JavaScript, Git
Mein Werdegang
| Hochschule Master | Hochschule Pforzheim, Master Embedded Systems (Voraussichtlicher Abschluss: 2026) |
| Hochschule Bachelor | Hochschule Pforzheim, Bachelor Elektro- und Informationstechnik (Abschluss: 2023) |
| Uni Bachelor | KIT Karlsruhe, Bachelor Elektro- und Informationstechnik (gewechselt an die HS) |
| Gymnasium | Theodor-Heuss Gymnasium (G8) in Pforzheim Abitur 2018 |
| Grundschule | 2006-2010 Grundschule Engelsbrand |
| Sprachkenntnisse | Englisch (Schulkenntnisse & HS-Kenntnisse), Latein (Schulkenntnisse) |
| Ferienjobs | Alfred Tronser GmbH Engelsbrand (2018) hapema GmbH Engelsbrand (2019) |
| Vereine | Jugendfeuerwehr (2014-2017) Volleyball (ehemalig) |
| Werkstudent |
LTC-Laserdienstleistungen Engelsbrand (2020 - 2022) MAHLE Stuttgart (2023) Ich habe dort die Umstellung einer LABBOX auf einen Mikrocontroller, für ein Einweis-System für Wireless-Charging bei Autos, in meinem Praxissemester übernommen. Dabei wurde vor allem das Einlesen der Sensordaten und die Übertragung an die Prüfstandsoftware über UART und CAN implementiert. Danach war ich der Ansprechpartner für diesen Teil des Projektes als Werkstudent. Und habe die neueren Werkstudenten eingelernt und betreut. Pressemitteilung MAHLE |
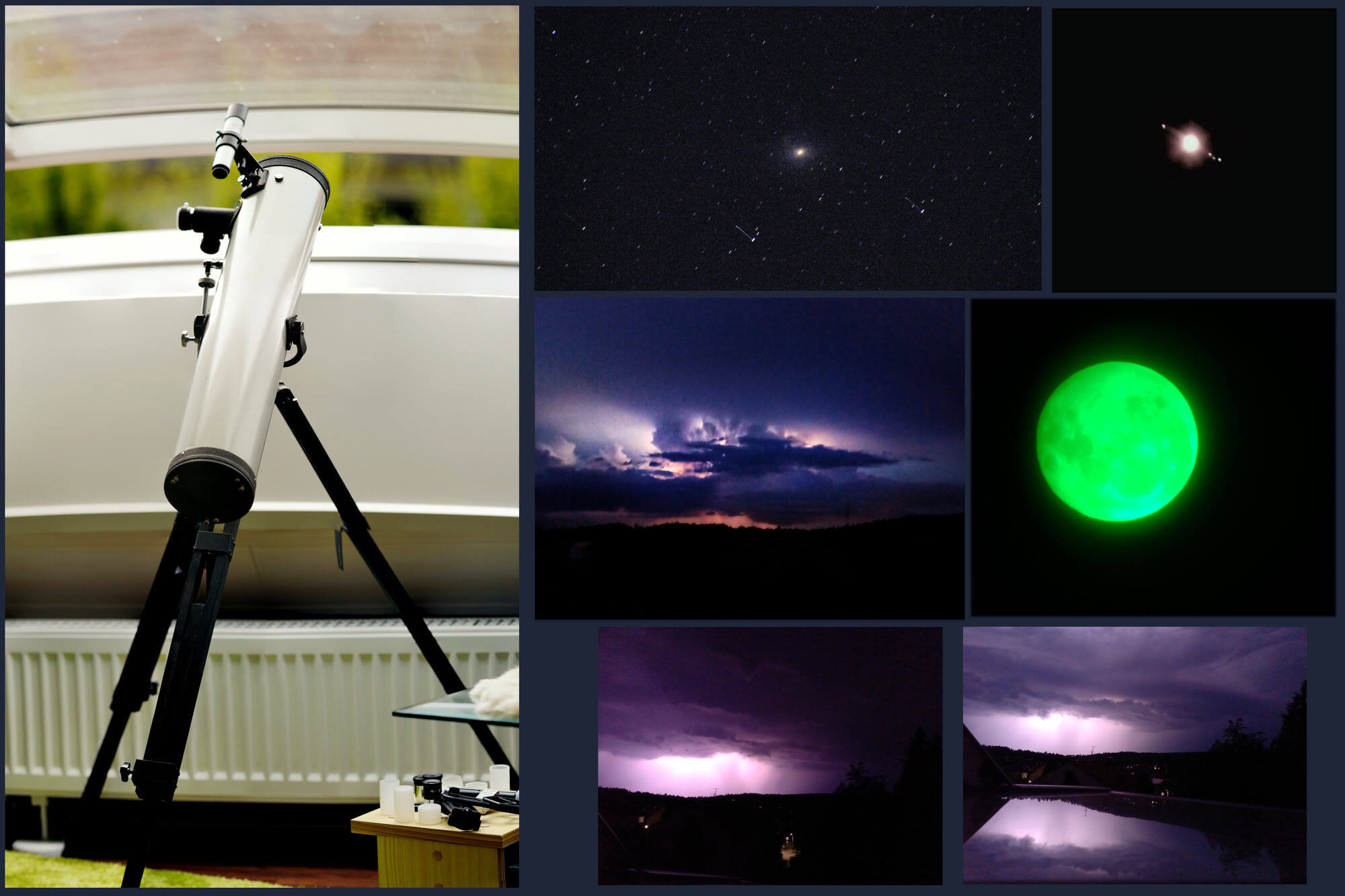
| Hobbys | Werken, Technik, Raspberry Pi und Arduino, 3D Rendering am PC, 3D Druck, Programmieren, Fotografieren und Fotos bearbeiten, Drohne fliegen und Videos bearbeiten, Kajak fahren |

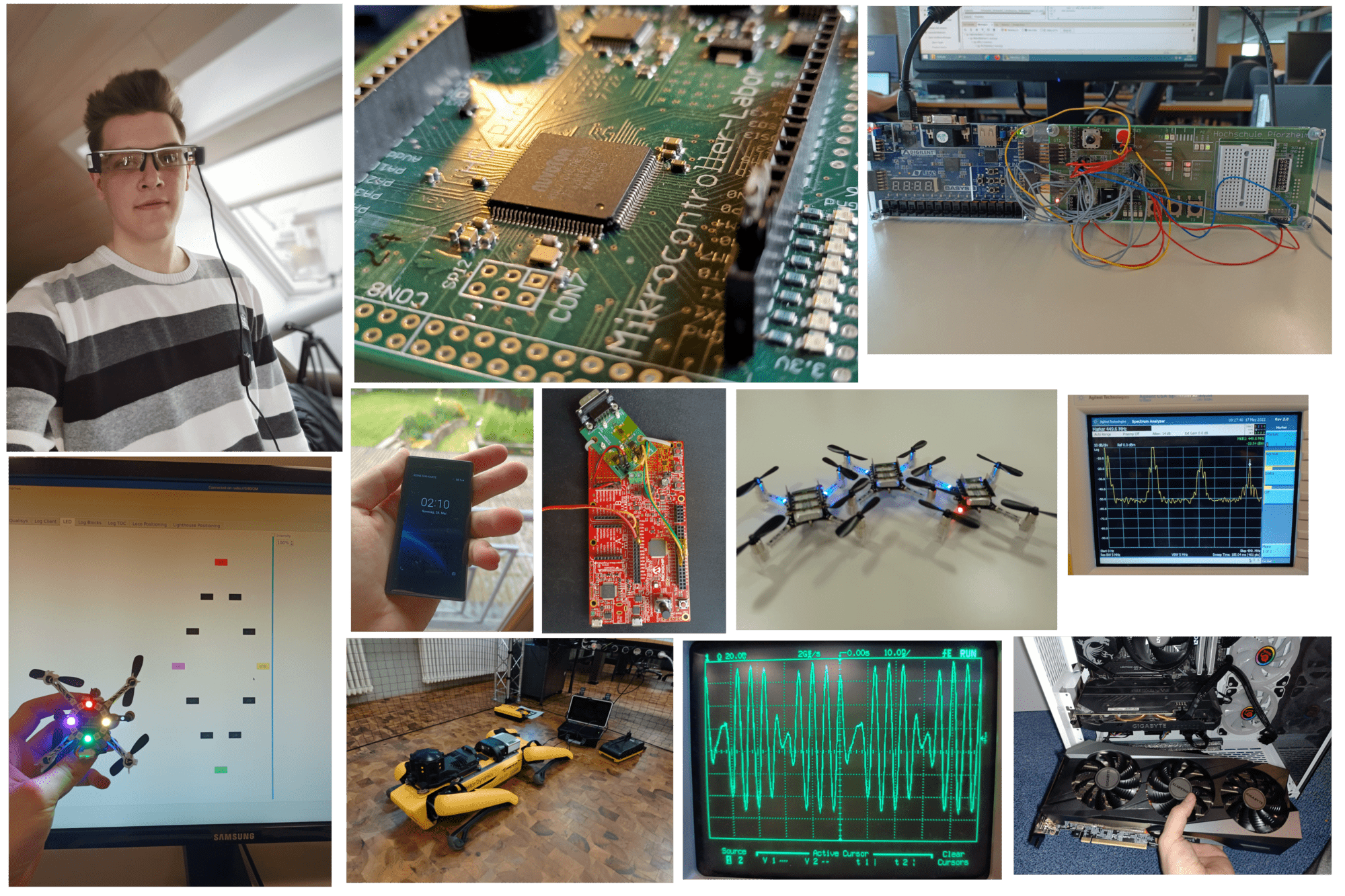
💻 Tech-Stack / Tools: Sensorik, KI-Steuermechanismen, Datenverarbeitung, Simulation.
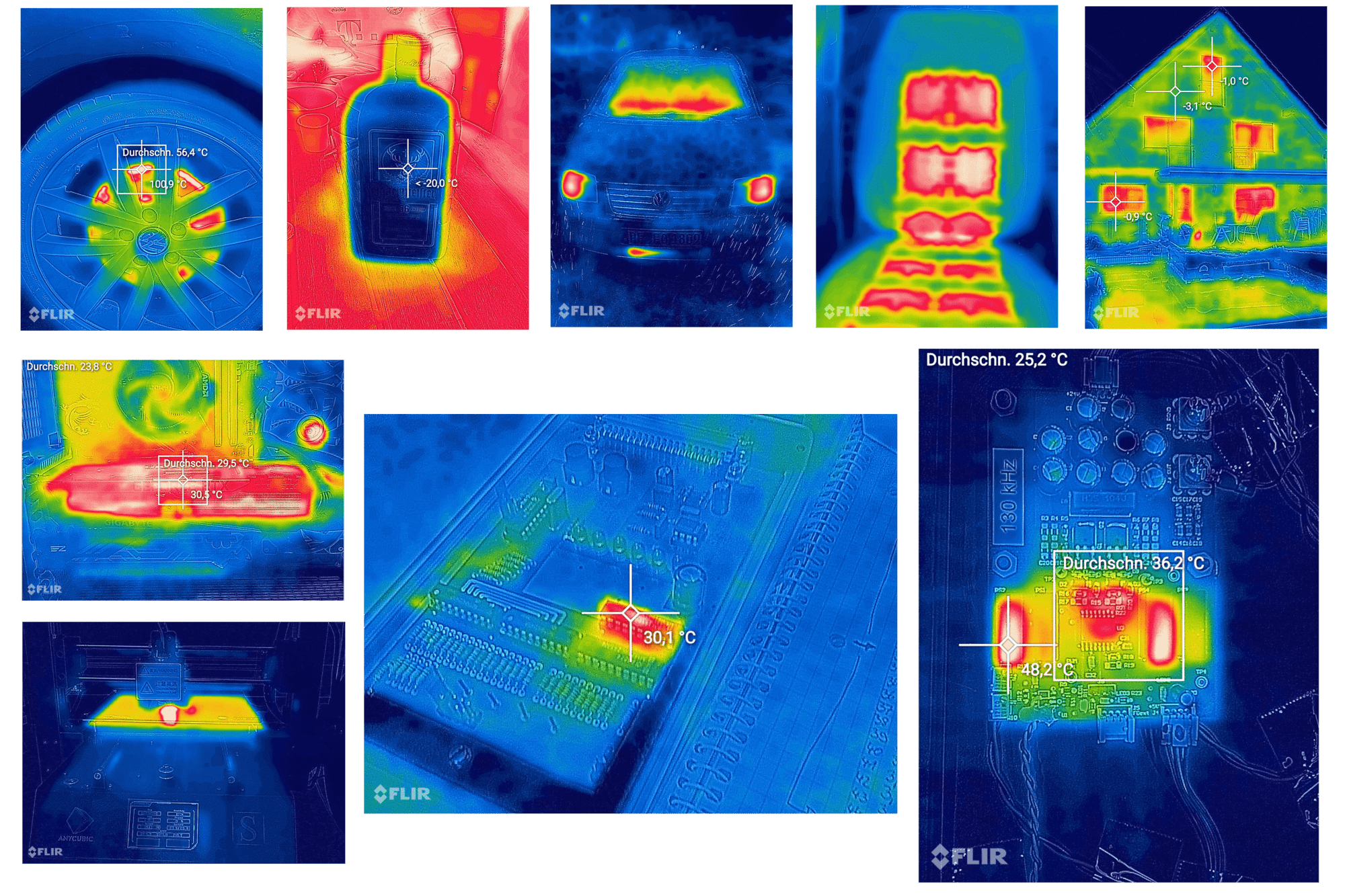
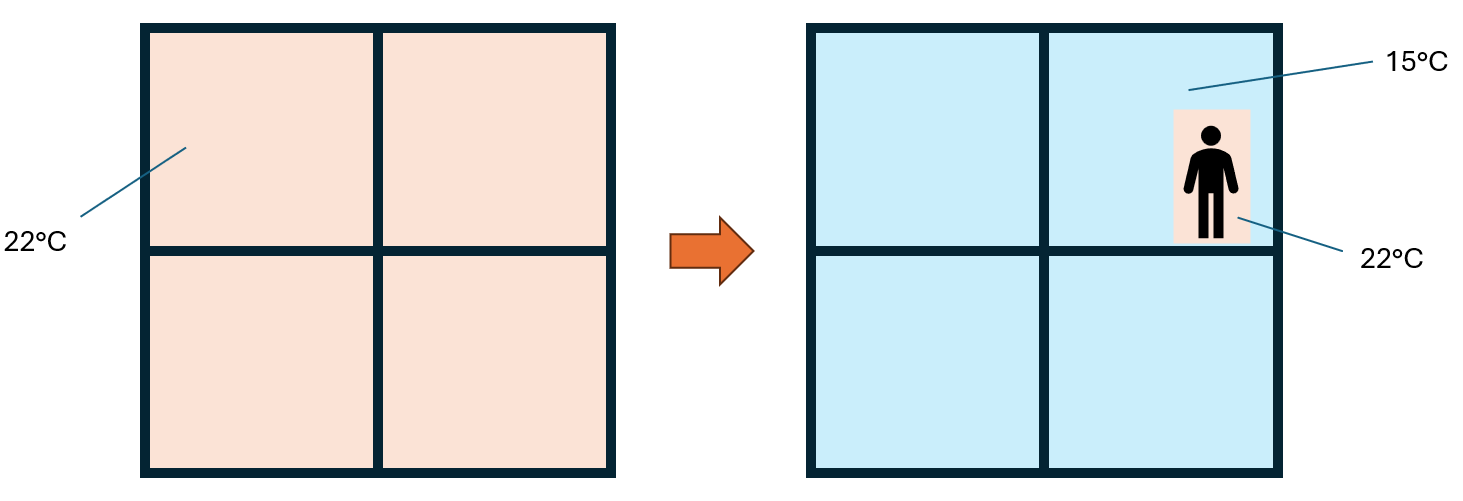
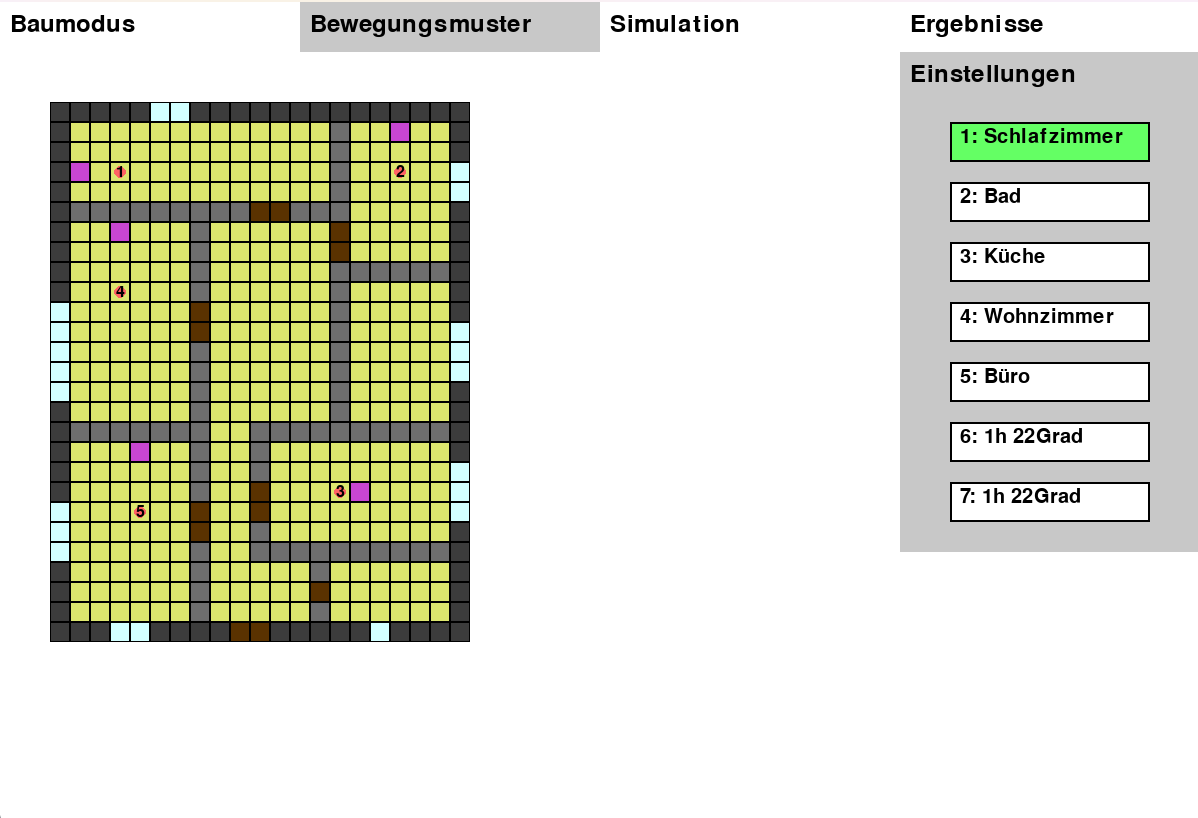
Diese Arbeit untersucht den technologischen Wandel vom herkömmlichen, raumbezogenen Heizen hin zu einer effizienten, personenbezogenen Wärmesteuerung.
Da bereits das Absenken der Raumtemperatur um 1 °C die Energiekosten um rund 6 % senken kann, liegt der Fokus darauf, Wärme nur dort bereitzustellen, wo sie tatsächlich benötigt wird. Mithilfe von 24-GHz-Radarsensoren und KI-gestützten Vorhersagemodellen lokalisiert das System Personen im Raum und antizipiert deren Anwesenheit für die kommenden 12 Stunden. Ein besonderes Highlight ist die Entwicklung eines dynamischen Infrarot-Spots, der Personen aktiv folgt und punktuelle Wärme liefert.
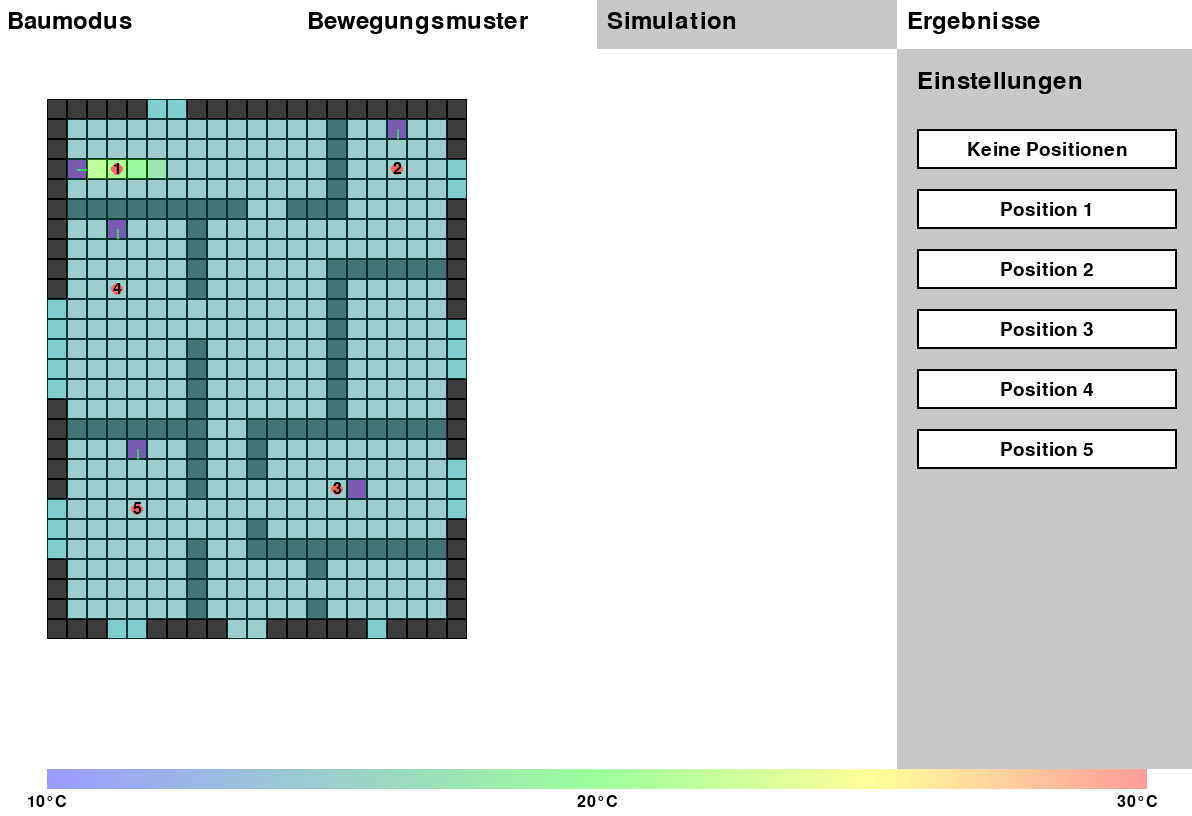
Simulationen bestätigen, dass diese intelligente Kombination aus Sensorik und Vorhersage den Energieverbrauch signifikant reduziert, ohne den Wohnkomfort einzuschränken.
Die Simulation bietet die Möglichkeit, einen Gebäudegrundriss nachzubauen und die Heizkosten im Vergleich zu berechnen. Mit beispielhaft gesetzten Positionen (z. B. für das Schlafzimmer) kann der Energieverbrauchsunterschied anschaulich dargestellt werden.
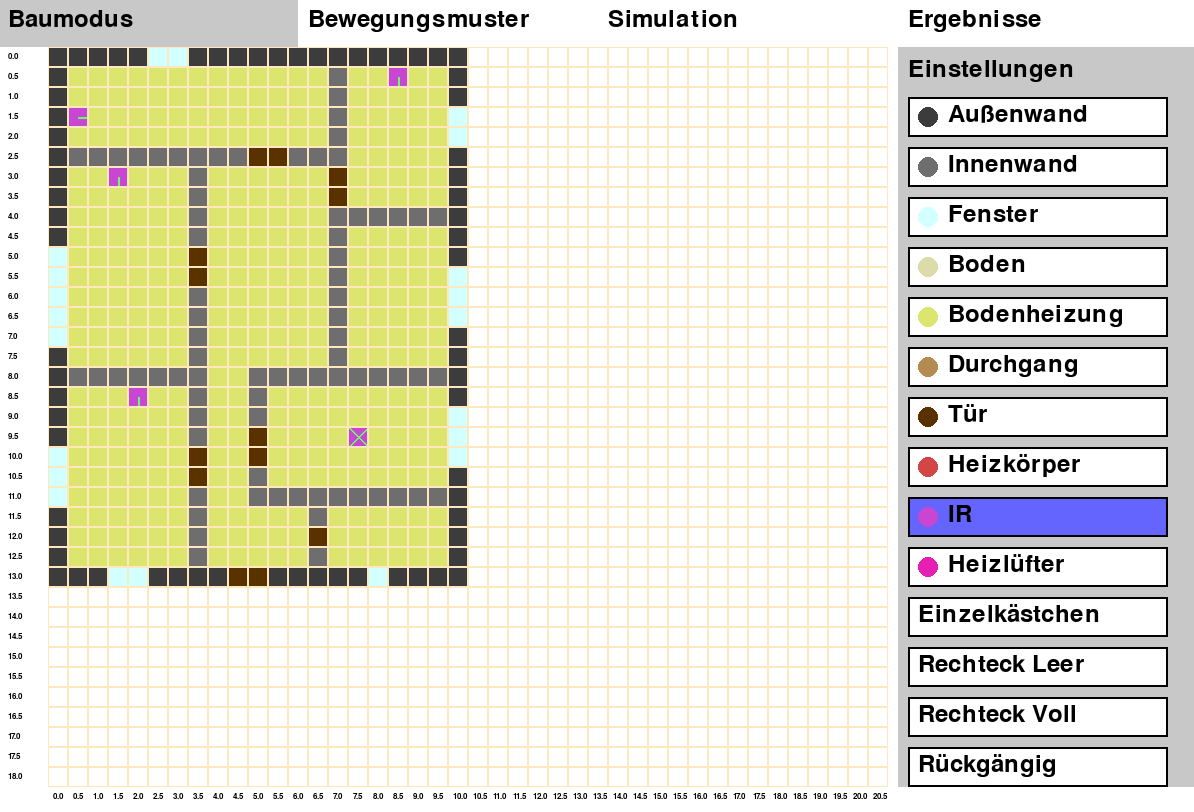
Die Systemarchitektur bündelt lokale Sensordaten und externe Wetterprognosen auf einem Raspberry Pi 4, der mittels KI und Home Assistant die Heizstrategie steuert. Während Module wie die ESP32-CAM und das Radarsensor-Modul (rd-03D) die genaue Position von Personen erfassen, liefert der DHT22 die nötigen Klimadaten für die präzise Regelung der Thermostate.
Die Simulation des monatlichen Energieverbrauchs belegt die Effizienz dieses Ansatzes: Durch die Kombination einer abgesenkten Grundtemperatur von 15 °C mit gezielter, personenbezogener Wärme (IR-Spots und Heizkörper) lässt sich der Verbrauch gegenüber einer konstanten Raumbeheizung auf 22 °C signifikant reduzieren. Besonders in den Übergangsmonaten zeigt das System seine Stärken, indem es flexibel auf den tatsächlichen Bedarf reagiert.
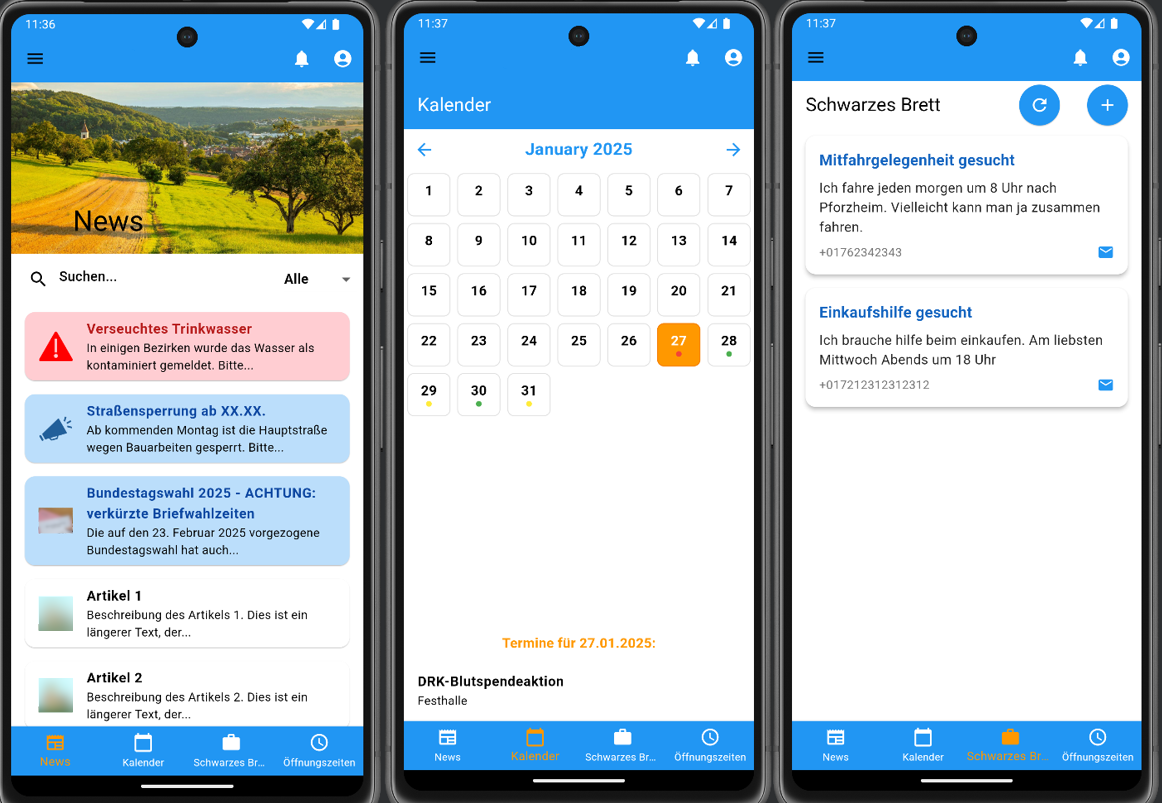
🎯 Fokus: Full-Stack App-Entwicklung für digitale Bürgerkommunikation.
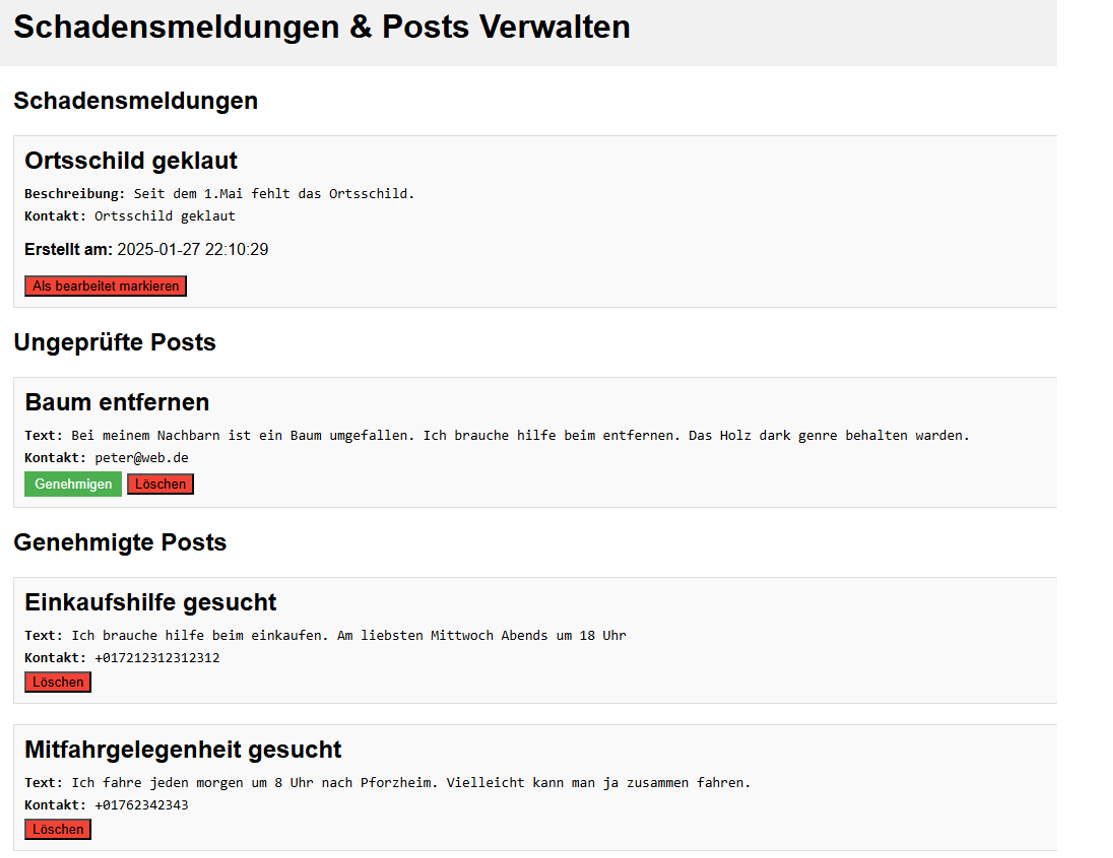
👥 Meine Rolle: Solo-Entwicklung (100% Eigenverantwortung für Frontend, Backend & Architektur).
💻 Tech-Stack / Tools: Flutter, Firebase, C# / Windows Forms (Admin Client).
Im Rahmen einer Projektarbeit im Master befinde ich mich aktuell in der Entwicklung einer umfassenden Gemeinde-App, die die Kommunikation zwischen Bürgern und der Verwaltung modernisieren soll. Die App wird Funktionen wie Nachrichten, Dienstleistungsanfragen, Veranstaltungskalender und Notfallbenachrichtigungen bieten.
Das Besondere an diesem Projekt ist der Full-Stack-Ansatz: Ich verantworte den gesamten Software-Lifecycle. Neben der mobilen App (entwickelt mit Flutter und Firebase als Backend-Infrastruktur) programmiere ich zusätzlich einen dedizierten Windows Forms Admin Client in C#, über den die Verwaltungsebene die Inhalte und Anfragen effizient steuern und verwalten kann.
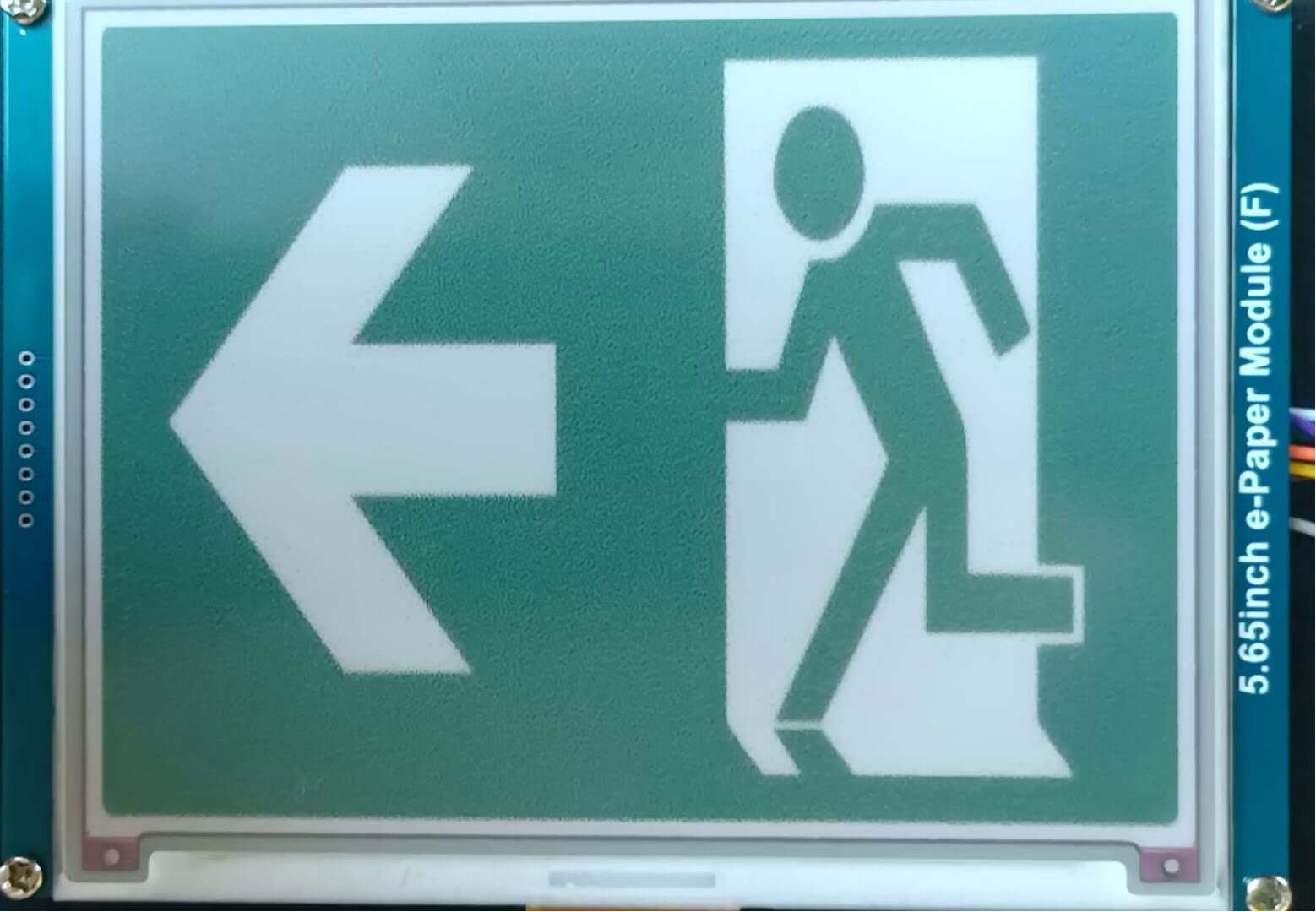
💻 Tech-Stack / Tools: KI, Wegfindungsalgorithmen (A*/Dijkstra), Computer Vision, E-Paper-Displays.
Die Bachelorarbeit beschäftigt sich mit der Entwicklung eines intelligenten und reaktiven Fluchtwegesystems, das im Gegensatz zu den statischen Fluchtwegeschildern dynamisch auf Notfallsituationen reagiert.
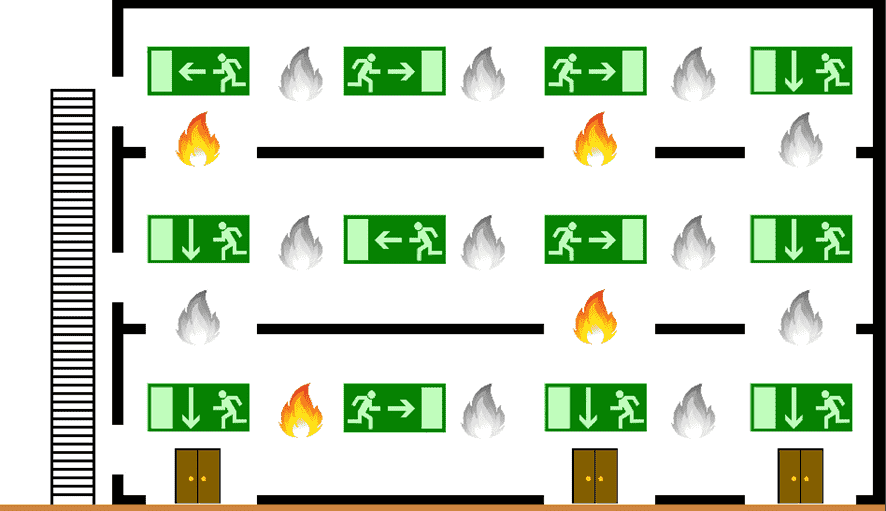
Statische Schilder bieten zwar Orientierung, leiten aber unabhängig von der aktuellen Gefahrenlage immer in dieselbe Richtung. Das entwickelte System nutzt moderne Technologien wie Wegfindungsalgorithmen, E-Paper-Displays und Kameras in Kombination mit Künstlicher Intelligenz (KI), um dynamische Fluchtwege in Echtzeit zu berechnen und zu optimieren.


💻 Tech-Stack / Tools: C++, Python, Vicon Motion Capture, UDP, Crazyflie Drohne, Quaternionen.
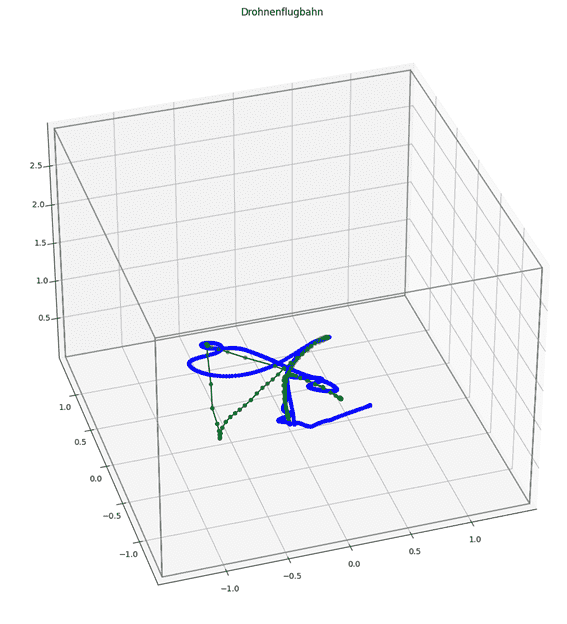
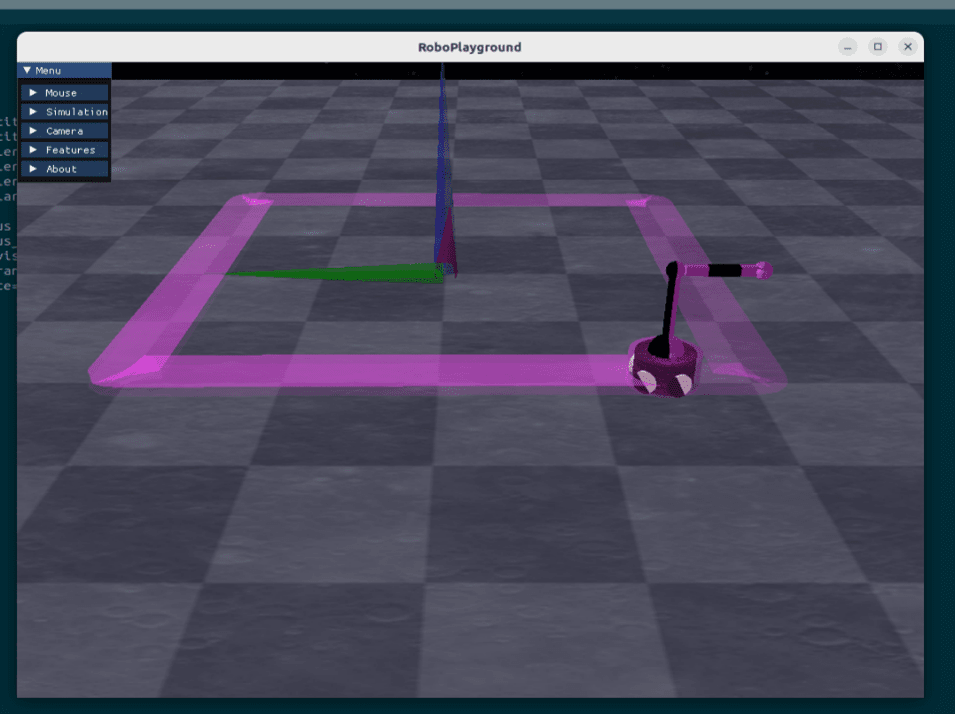
Diese Projektarbeit beschäftigt sich mit der Entwicklung einer hochpräzisen Drohnensteuerung. Mithilfe einer Crazyflie Drohne, einem Vicon-Motion-Capture-System und einer eigens geschriebenen Simulation können Flugrouten vorab berechnet und autonom abgeflogen werden.
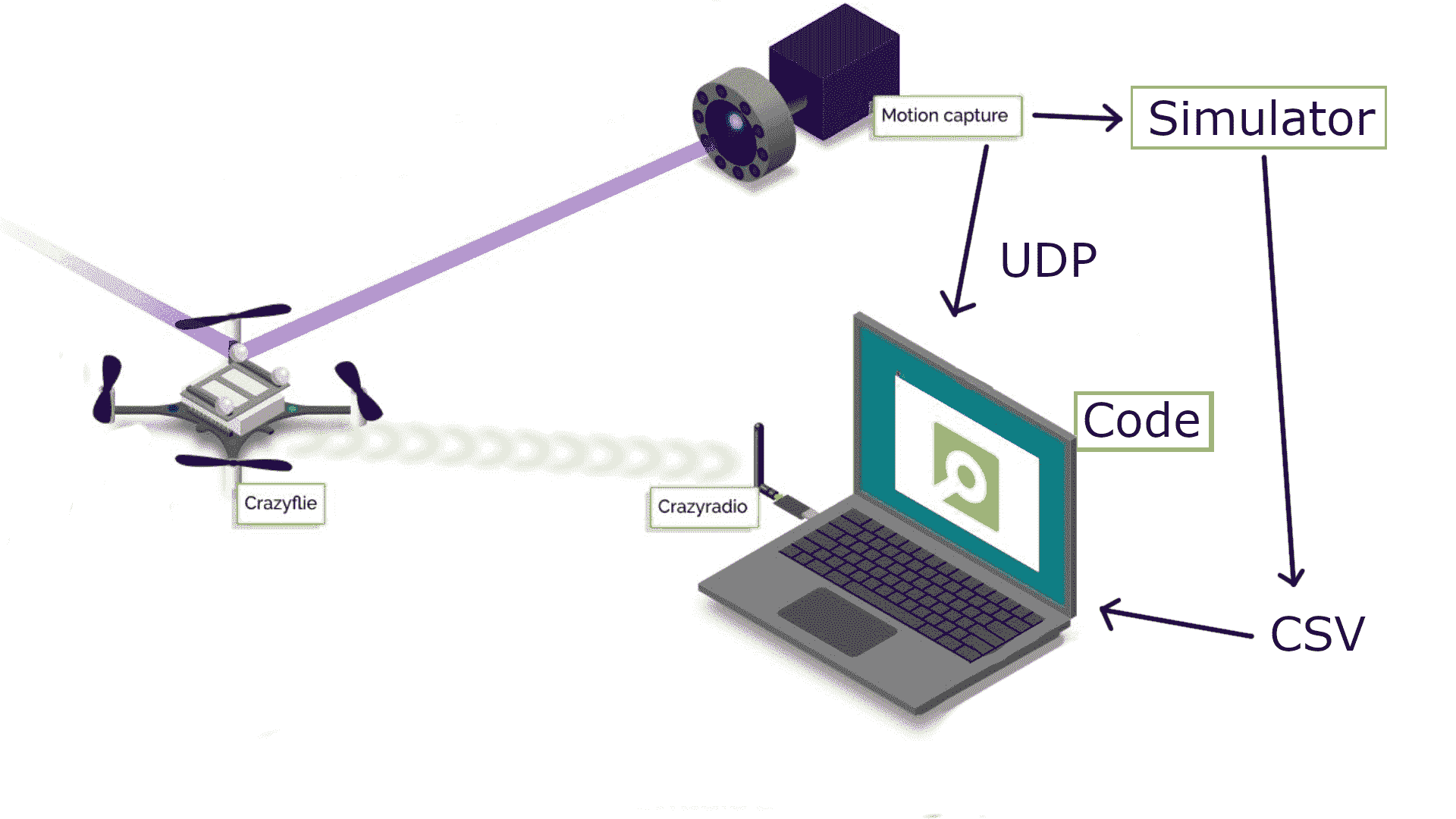
Die Architektur: Die Simulationsumgebung wurde in C++ programmiert, während die eigentliche Drohnensteuerung in Python umgesetzt wurde. Eine Echtzeit-UDP-Verbindung überträgt die Koordinaten des Vicon-Systems (erfasst über kleine Reflektor-Bälle an der Drohne) an die Steuerungssoftware.
Um die Orientierung im Raum zu berechnen, wurden komplexe Koordinatensysteme (Quaternionen) in die Simulation integriert. Die Drohne ist nun in der Lage, Wegpunkte einzuspeichern, zu simulieren und komplett selbstständig nachzufliegen – mit einer Genauigkeit von wenigen Zentimetern.


💻 Tech-Stack / Tools: Arduino, CAN-Bus (100kBaud), CANoe (Vector), C++, MOSFET-Steuerung.
Ziel dieser Projektarbeit war es, dem Benutzer zu ermöglichen, die Heckklappe eines Audi A4 8K nicht nur aus der Ferne automatisch zu öffnen, sondern auch bequem über den Funkschlüssel zu schließen.
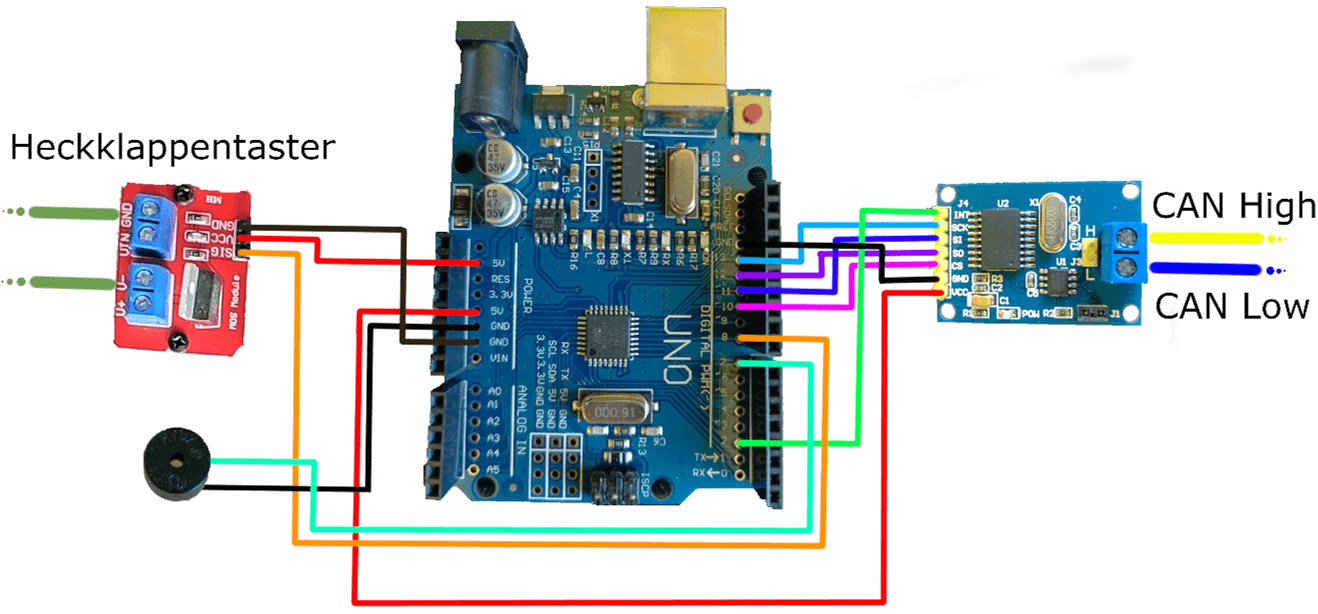
Standardmäßig lässt sich die Heckklappe nur von innen über einen Taster schließen. Das entwickelte Erweiterungsmodul steuert das Heckklappensteuergerät über den CAN-Bus an, sodass die Heckklappe schließt, wenn der Funkschlüssel betätigt wird.
Die technische Umsetzung: Die CAN-Kommunikation zwischen Zentralverriegelungssteuergerät, Türsteuergerät und CAN-Gateway wurde zunächst mit dem CAN-Interface VN1610 und der Software CANoe von Vector analysiert und simuliert.
Das finale Modul nutzt einen Arduino zur Überbrückung des Heckklappentasters mithilfe eines MOSFETs. Wenn der Arduino innerhalb von zwei Sekunden dreimal das entsprechende Signal auf dem CAN-Bus empfängt, schließt er die Klappe. Dabei wird die Position der Heckklappe kontinuierlich durch CAN-Botschaften überwacht, um die Sicherheit (Einklemmschutz) zu gewährleisten.
Reflective and bistable e-paper for smart and AI-controlled escape route signage
Von: Karlheinz Blankenbach, Ingo Mann, Fabian Forster, Steffen Reichel
(Diese Veröffentlichung ist aus meiner Bachelorarbeit entstanden. Der Fokus dabei liegt auf den E-Paper-Displays)
Zum Artikel
Hier ist ein Link zu meiner Kudos Seite:
Kudos Profil🎯 Fokus: Simulation und Konstruktion eines quadrupeden Roboters.
💻 Tech-Stack / Tools: CAD (Blender/Fusion), Kinematik-Simulation, Servosteuerung.
Ziel dieses privaten Projekts ist die Konstruktion und Programmierung eines vierbeinigen Roboterhundes von Grund auf.
Hardware-Architektur
Der Roboterhund besitzt 8 Servomotoren:
- Pro Bein kommen 2 Servos (Hüfte + Knie) zum Einsatz.
- Innovation: Die Hüftgelenke sind um 12° nach außen gedreht. Dies ermöglicht ein seitliches Abfangen ohne zusätzliche Motoren in der Schulter, was Gewicht und Strom spart.
Software & geplante Features
Der Roboter soll softwareseitig „pet-like“ reagieren:
- Persönliche Funktionen: Kleine Idle-Animationen (Wackeln, Nicken, „Atmen“), Display-Emotionen (Augen, Freude, Müdigkeit) und Reaktionen auf Ansprechen / Präsenz.
- Autonomes Verhalten: Patrouillieren, leises Folgen und Reagieren auf Zuruf. Eine spätere Interaktion über Sensoren (Ton, Licht, Kamera) ist vorgesehen.
Aktuell befindet sich das Projekt in der Simulationsphase, um die Mathematik hinter der 12-Grad-Rotation des Schultergelenks zu validieren, bevor die finale Hardware montiert wird.


🎯 Fokus: Konzeption und Aufbau einer latenzfreien, dezentralen Kommunikationslösung.
💻 Tech-Stack / Tools: Matrix (Synapse), Element, Mumble, Jitsi, Linux-Server Hosting.
Dieses Projekt umfasst die Entwicklung und Bereitstellung einer vollständig selbst gehosteten Kommunikationsplattform. Das Ziel ist es, eine unabhängige, datenschutzkonforme und hochperformante Alternative zu kommerziellen Plattformen (wie Discord) zu schaffen – optimiert für extrem niedrige Latenzen im Gaming-Bereich und skalierbar für Community- oder Firmenzwecke.
Die hybride Systemarchitektur
Anstatt alle Funktionen in eine monolithische, ressourcenhungrige Anwendung zu integrieren, basiert das System auf einem intelligenten, mehrgleisigen Aufbau:
- Zentrale Verwaltung & Text-Chat (Matrix / Element): Dient als modernes Hauptquartier für Textkommunikation, Dateiaustausch und die Verwaltung von Räumen.
- Ultra-Low-Latency Voice (Mumble): Für die reine Sprachkommunikation während des Gamings wird Mumble eingesetzt. Dies garantiert eine ressourcenschonende, nahezu verzögerungsfreie Übertragung (Zero-Ping), die herkömmlichen Voice-Chats überlegen ist.
- Video- & Screen-Sharing (Jitsi): Aufwendige Video-Streams und Bildschirmübertragungen werden über externe Jitsi-Widgets (via Element) abgewickelt, um die Bandbreite des lokalen Host-Servers (Mini-PC) nicht zu überlasten.
Zukunftsausblick: Aktuell wird das System über eine Kombination der Einzelclients bedient. Im nächsten Schritt ist die Programmierung eines eigenen, schlanken Launchers geplant, der die Matrix- und Mumble-Prozesse im Hintergrund vereint und mit einem Klick synchron startet.
💻 Tech-Stack / Tools: Raspberry Pi Zero, 12V-Pumpen, Python/C++.
Diese Maschine wurde privat gebaut, um aus so wenig Grundzutaten wie möglich so viele verschiedene Cocktails wie möglich zu mixen. Ein Raspberry Pi Zero steuert über Relais insgesamt 10 Pumpen an.
Da sich kohlensäurehaltige Getränke nicht pumpen lassen, gibt es einige separate Zutaten, die von Hand hinzugefügt werden. Das Faszinierende an diesem Projekt ist die reine Mathematik dahinter:
Die Kombinatorik (Berechnung)
Grundzutaten in der Maschine (10): Wodka, Rum, Gin, Tequila, Whiskey, Triple Sec, Cranberrysaft, Ananassaft, Orangensaft, Maracujasaft.
Für die Auswahl von exakt 3 Grundzutaten aus den 10 verfügbaren gibt es \( \binom{10}{3} = 120 \) mögliche Kombinationen.
Kombiniert man dies mit 1 bis 3 der zusätzlichen (manuellen) Zutaten, ergibt sich folgende Gleichung:
\( 120 \times (9 + 36 + 84) = 120 \times 129 = 15.480 \) Cocktails.
Fazit: Mit diesem Setup sind theoretisch bis zu 15.480 Variationen möglich. Ob alle Varianten auch schmecken, muss natürlich erst empirisch getestet werden. :)


💻 Tech-Stack / Tools: Python, TensorFlow / PyTorch, Spektrogramm-Analyse, MIDI-Verarbeitung.
Ziel dieses laufenden Projekts ist es, ein neuronales Netz zu trainieren, das eigenständig Musik generiert und abspielt. Es wurden zwei unterschiedliche Ansätze zur Datenfütterung evaluiert:
- MIDI-Daten: Hierbei wird das Modell mit digitalen Notenwerten, Tonhöhen und Timing-Parametern trainiert. Das System generiert daraufhin neue MIDI-Sequenzen als Zahlenwerte.
- Spektrogramme: Bei diesem Ansatz werden reale Musikstücke in Bild-Spektrogramme umgewandelt. Eine Bild-Generierungs-KI lernt, neue Spektrogramme zu erstellen, die anschließend wieder in MP3-Dateien zurückkonvertiert werden.
Beide Varianten befinden sich derzeit in der Trainings- und Optimierungsphase.

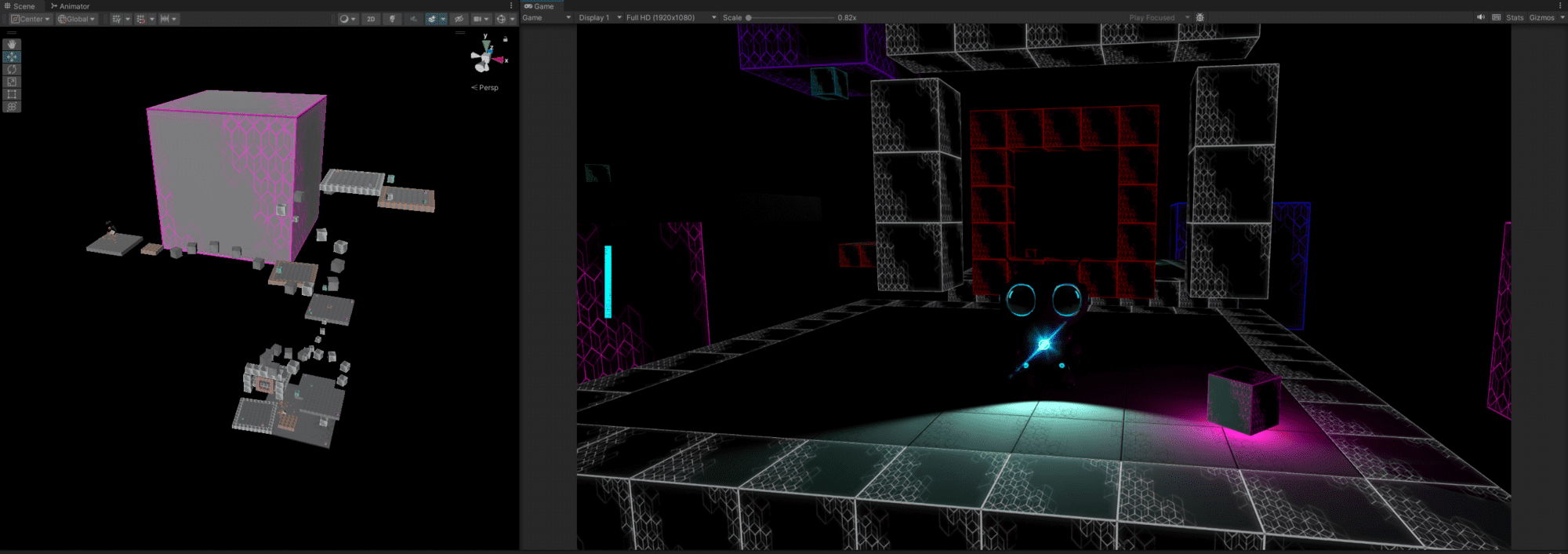
👥 Meine Rolle: C#-Scripting, 3D-Modellierung & Animation.
💻 Tech-Stack / Tools: Unity 3D, C#, Blender.
Ein Kumpel und ich haben in unserer Freizeit angefangen, ein Spiel zu programmieren. Mittlerweile sind wir ein fünfköpfiges Team. Nachdem der Prototyp erfolgreich getestet wurde, entwickeln wir aktuell die Beta-Version.
Für das Projekt wird Unity 3D verwendet. Wir schreiben den gesamten C#-Code selbst und modellieren die Assets, Animationen und Texturen in Blender.

Storyline des Spiels:
In einer fernen Zukunft hat die Menschheit eine Technologie entdeckt, die Zeitreisen ermöglicht. Der Spieler übernimmt die Rolle eines Piloten im "Legacy-Projekt" und reist durch verschiedene Epochen – von der primitiven Bronzezeit bis hin zur industriellen Revolution –, um die Geschichte der Erde vor außerirdischen Eindringlingen zu beschützen.
Das Spiel verbindet Action- und Tower-Defense-Elemente, bei denen der Spieler Verteidigungstürme aufstellen und mit verschiedenen Waffen ausstatten kann, um sich gegen feindliche Armeen zu behaupten.
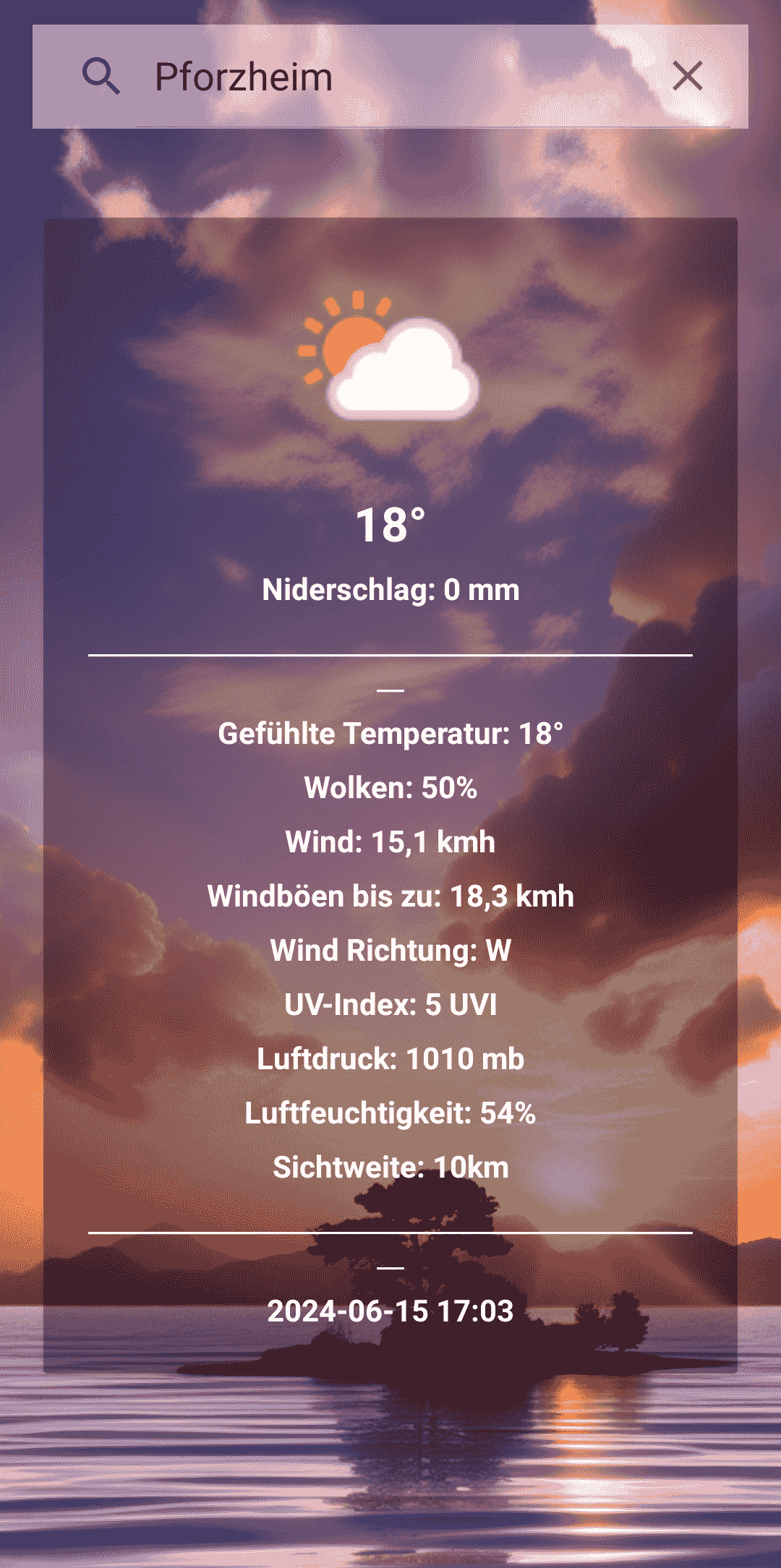
Instagram SeiteEine plattformübergreifende App (Android/iOS) zur Anzeige der aktuellen Wetterdaten. Entwickelt in C# und Xamarin (.NET). Die Livedaten werden über die OpenWeatherMap API abgerufen.
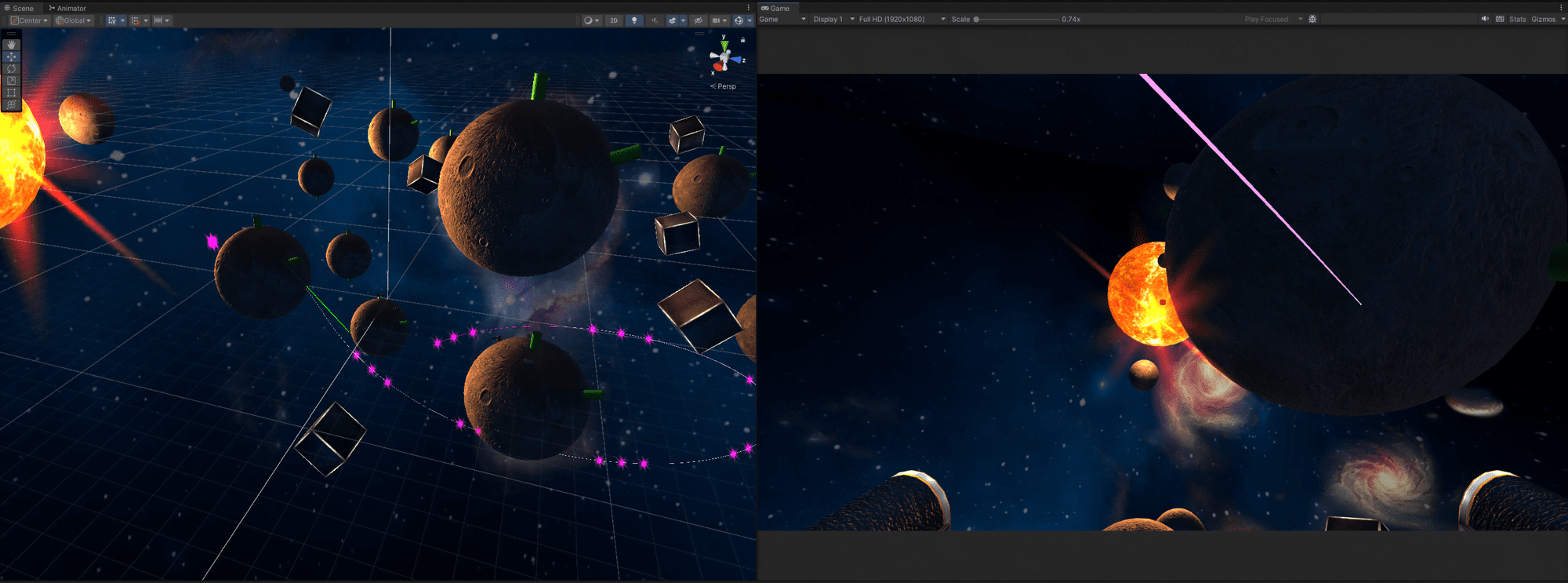
Prozedural generierte Planetentexturen
Die Texturen werden algorithmisch anhand eines "Seeds" generiert, wodurch eine nahezu endlose Anzahl an einzigartigen Planetenoberflächen entsteht.
3D Jump and Run
Gravitationsbasierter Weltraum FPS
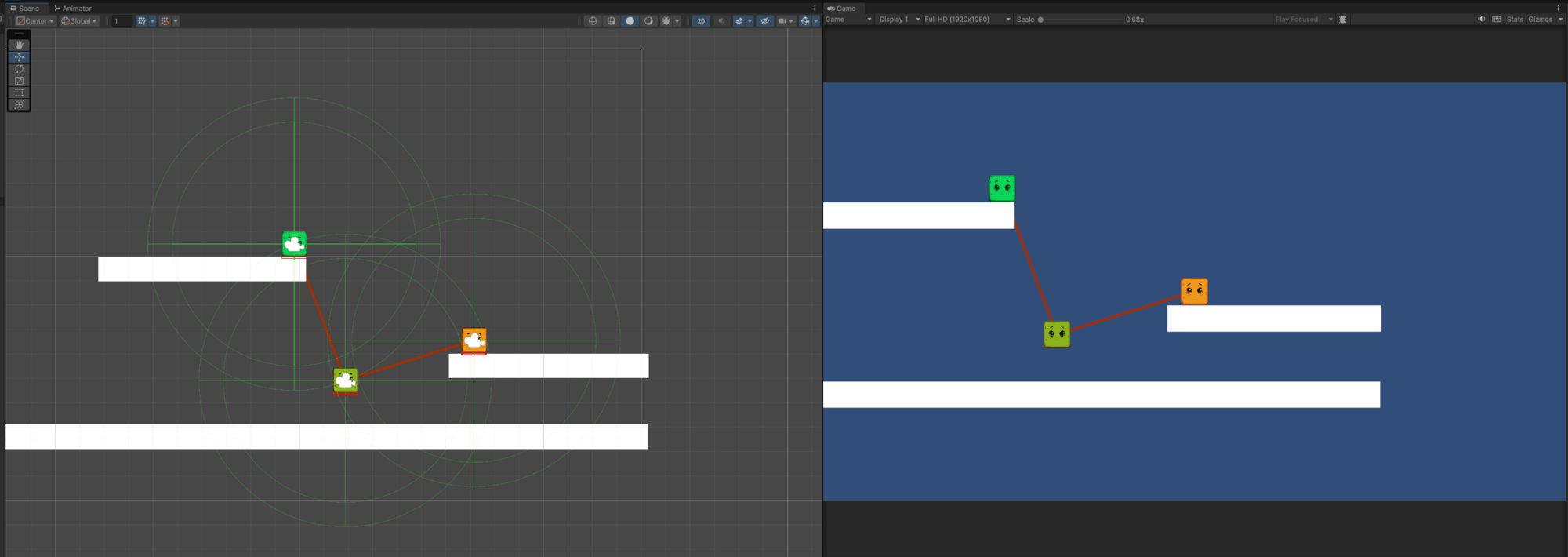
2D-Chained-Together